西门子CPU412-1控制器西门子代理商 西门子总代理
西门子CPU412-1控制器西门子代理商 西门子总代理
西门子CPU412-1控制器西门子代理商 西门子总代理
手把手教你WIN10系统如何安装WINCC V7.5工控软件安装对系统的要求是比较高的,目前基本都是win10系统,今天我来教教大家如何在win10系统中安装WinCC V7.5。
安装时需要注意以下事项:
1. 安装环境需要满足软件的兼容性要求。
2.在windows的计算机名称中不允许使用下列字符:
. , ; : ! ? " ' ^ ? ` ~ _ = / \ ? @ * # $ % & § °( ) [ ] { } < > 空格符
并且:只能用大写形式。 第一个字符必须是字母。
同一网络中多台安装WinCC的计算机名称的前12个字符必须唯一。由于前12个字符不唯一,会引起服务器客户机通信的异常。
例如两台WinCC服务器名称不能命名为“PLANT1ROOM01SER01”及“PLANT1ROOM01SER02”。
3.完成 WinCC 安装后,不能修改 Windows 的计算机名称。
关键安装步骤如下:
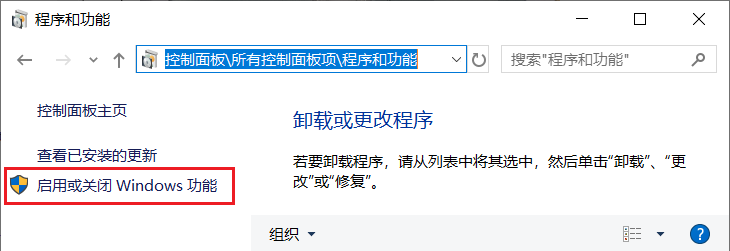
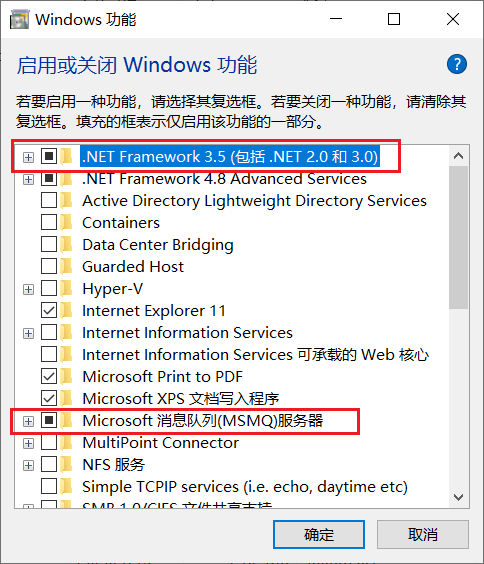
1.在 windows 中通过“控制面板\所有控制面板项\程序和功能”, 分别安装 .NET framework 3.5 和 Microsoft 消息队列(MSMQ)服务器。
注意:
这种情况下安装 .NET framework 3.5 需要计算机处于连接互联网的状态,然后根据提示安装即可。
如果计算机无法连接互联网,需要:
● 将 Windows 10 操作系统安装光盘放入光驱。
● 以管理员身份打开“命令提示符”窗口并输入命令“dism /online /enable-feature /featurename:NetFX3 /All /Source:D:\sources\sxs /LimitAccess”并回车开始进行安装。其中 “D” 为光驱盘符。如图所示:
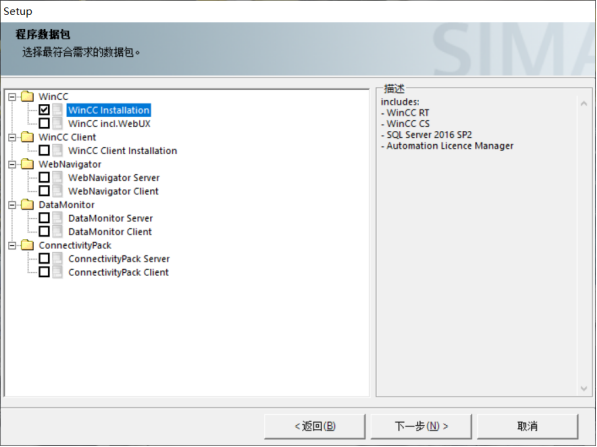
2.使用光盘根据引导安装WinCC V7.5 即可。如无特殊要求,首次使用建议选择数据包安装。关键截图如下:

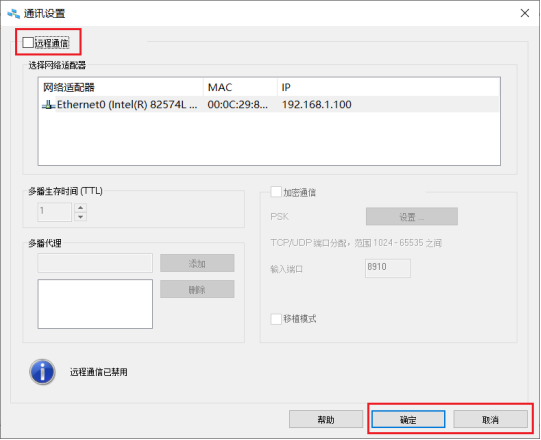
安装完成根据提示重新启动计算机后,会弹出如下界面。对于单机版项目可以选择取消。对于C/S架构的项目建议激活“远程通信”。
3.根据提示安装SIMATIC NET 软件。如需和 PLC 通信,系统中必须安装 SIMATIC NET 软件。
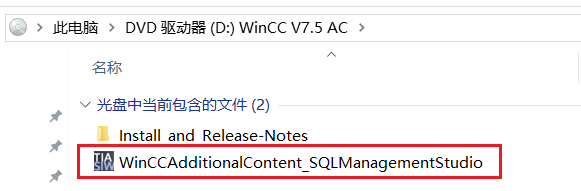
4.如需通过 SQL Server Management Studio 管理数据库,那么需要使用 additional Content 安装管理工具。
打开光盘执行里面的安装程序即可。如下图:
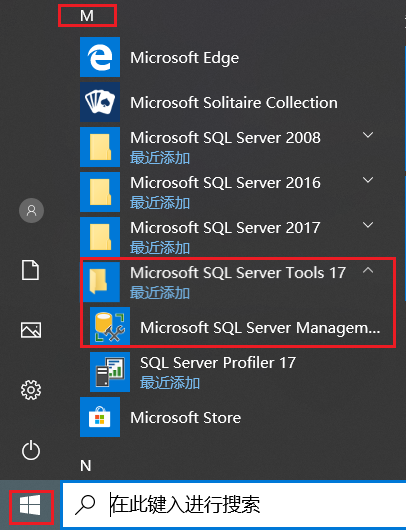
安装完成后就可以在windows开始菜单中找到SQL Server 管理工具。
S7-200 SMART CPU提供了四种开环运动控制方法:
脉冲串输出(PTO):内置在CPU的速度和位置控制。此功能仅提供脉冲串输出,方向和限值控制必须通过应用程序使用PLC中集成的或由扩展模块提供。
脉宽调制(PWM):内置在CPU的速度、位置或负载循环控制。若组态PWM输出,CPU将固定输出的周期时间,通过程序控制脉冲的持续时间或负载周期。可通过脉冲持续时间的变化来控制应用的转速或位置。
运动轴:内置于CPU中,用于速度和位置控制。此功能提供了带有集成方向控制和禁用输出的单脉冲串输出,还包括可编程输入,并提供包括自动参考点搜索等多种操作模式。
运动轴组:支持基于PTO的开环轴组功能,可支持2轴或3轴的直线插补功能,并可以支持通过运动控制向导的Move_Path功能进行多段路径规划观。
西门子S7-200SMART PLC 可使用PLS指令编程使CPU输出高速脉冲。脉冲输出(PLS)指令控制高速输出(Q0.0、Q0.1和Q0.3)提供脉冲串输出(PTO)和脉宽调制(PWM)功能。通过特殊存储器来控制脉冲输出。
二、PLS指令编程应用下面通过一个简单的案例让大家了解并掌握PLS指令实现定位控制的使用;
案例要求:有一丝杆滑台通过步进电机拖动,已知丝杆螺距为4mm,步进电机转一圈的脉冲为800个脉冲。要求使用PLS指令完成以下定位控制。
按下启动,电机从当前位置运行10cm,随时可以手动反向和停止。
使用 PLS 指令编程,以实现 PTO 输出,可按照以下步骤编程:
第一步:设置 PTO 控制字节,以确定使用单段操作或多段操作,是否更新频率或脉冲数;
第二步:如果是单段操作,装载或更新频率值,脉冲数;如果是多段操作,装载包络表起始地址以及包络表每段起始频率值,结束频率值,脉冲数;
第三步:设置 PLS 指令通道, 以确定是 Q0.0、Q0.1 或 Q0.3 PTO 输出;
第四步:沿触发 PLS 指令。
三、使用SM位置组态和控制PTO操作PLS 指令读取存储于指定 SM 存储单元的数据,并相应地编程 PTO 生成器。
SMB67 控制 PTO0 ,SMB77 控制 PTO1 ,SMB567 控制 PTO2 。PTO 控制寄存器的 SM 单元表介绍了用于控制 PTO 操作的寄存器。可快速参考该表来确定在 PTO/PWM 控制寄存器中放置什么值才能调用想要的操作。
可通过修改 SM 区域(包括控制字节)中的单元,然后执行 PLS 指令,来改变 PTO 的特性。
任何时候都可通过向 PTO 控制字节(SM67.7、SM77.7 或 SM567.7)使能位写入 0,然后执行 PLS 指令,来实现禁止 PTO输出 。输出点将立即恢复为过程映像寄存器控制。
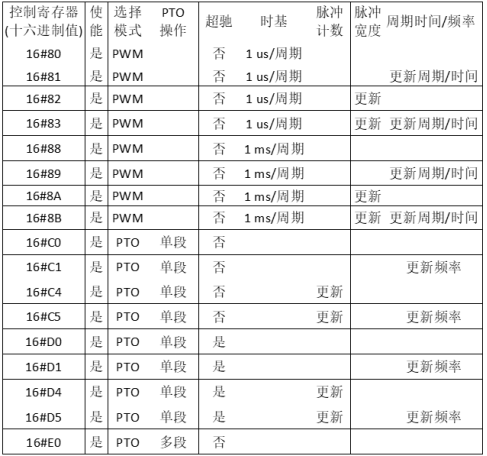
PTO 产生单段脉冲串或者多段脉冲串,需先组态 PTO 控制字节(SMB67、SMB77 和 SMB567)。
PTO/PWM 控制寄存器的 SM 单元如下表 1 所示:
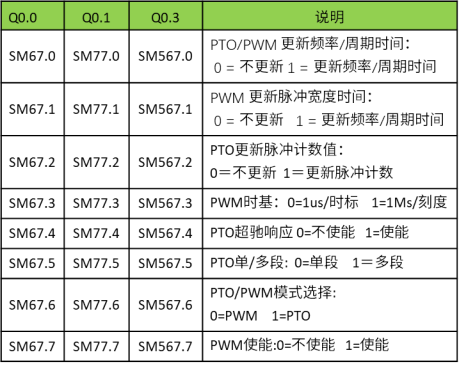
PTO 控制字节(SMB67、SMB77 和 SMB567), 如下表 2 所示:
除组态 PTO 控制字节,应该在执行 PLS 指令前装载或更新脉冲频率,脉冲数。
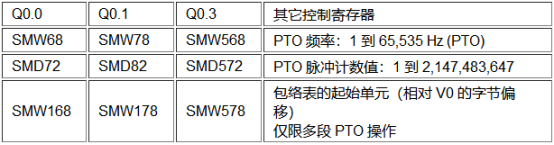
如果使用多段脉冲串,在执行PLS 指令前还需要装入包络表的起始偏移量和包络表的值。 如下表 3 所示:
?根据设定距离换算成脉冲之前,需要知道步进电机丝杠转一圈的距离和驱动器的细分。如一圈为4MM,细分为800,设定运行距离为10CM。
分析:10cm=100mm,一圈走4mm,则100mm走100÷4=25圈,已知一圈需要800个脉冲,则10cm需要的脉冲数:25×800=20 000个。
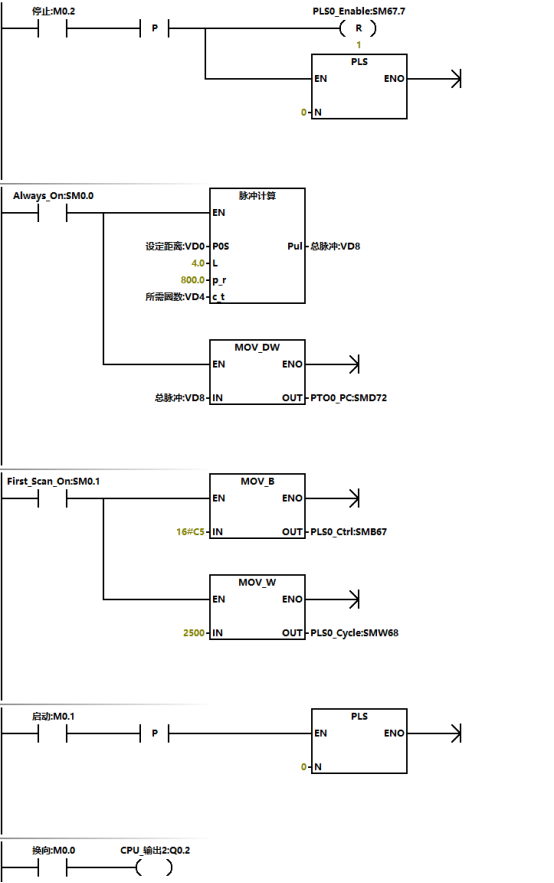
根据这个运算,列出来一个公式,可以在触摸屏上随意的修改走的距离,定义为脉冲计算子程序。完整版程序如下所示: